|
Deng Haoyuan (邓皓元)
I'm a first-year PhD student at Nanyang Technological University, supervised by Prof. Ziwei Wang in the PINE Lab. My research focuses on Embodied AI, with interests in Bimanual Manipulation, Imitation Learning, and Reinforcement Learning. |

|
Research
I'm interested in Bimanual Manipulation, Imitation Learning, and Reinforcement Learning.
|
|
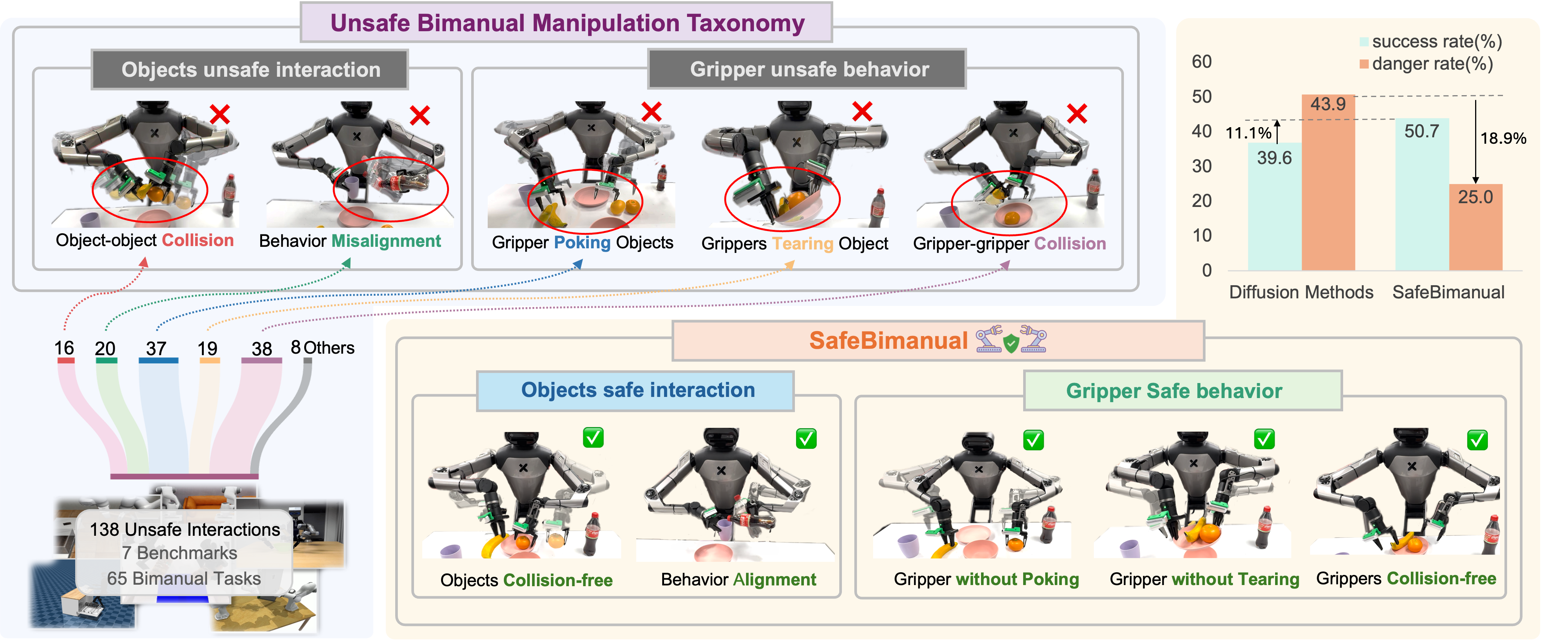
SafeBimanual: Diffusion-based Trajectory Optimization for Safe Bimanual Manipulation
Haoyuan Deng, Wenkai Guo, Qianzhun Wang, Zhenyu Wu, Ziwei Wang† CoRL, 2025 project page / arXiv / Code A test-time trajectory optimization framework for any pre-trained diffusion-based bimanual manipulation policies, which imposes the safety constraints on bimanual actions. |
|
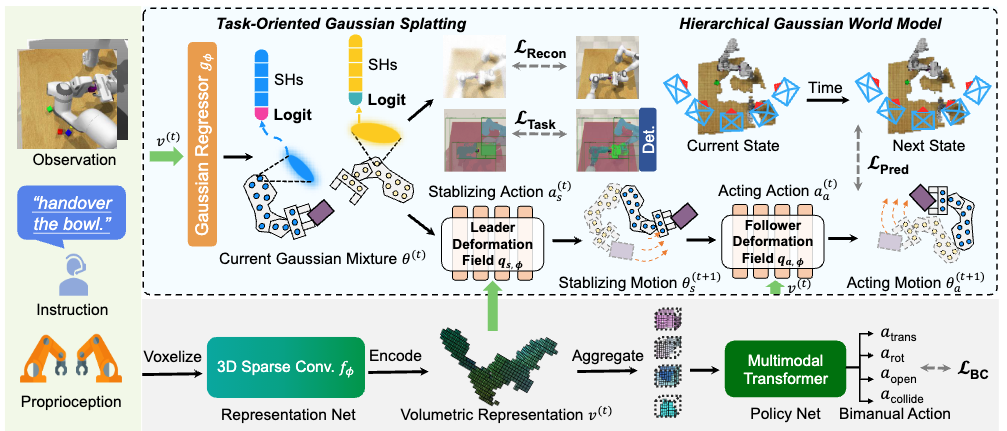
ManiGaussian++: Dynamic Gaussian Splatting for Multi-task Bimanual Manipulation
Tengbo Yu*, Guanxing Lu*, Zaijia Yang*, Haoyuan Deng, Season Si Chen, Jiwen Lu, Wenbo Ding, Guoqiang Hu, Yansong Tang†, Ziwei Wang IROS, 2025 arXiv / Code A novel framework that addresses the challenges of multi-task bimanual manipulation through hierarchical Gaussian world modeling. |
|
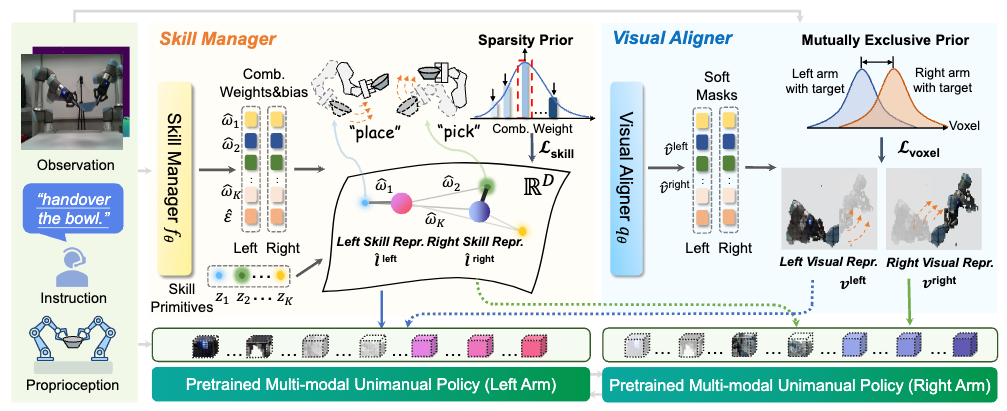
AnyBimanual: Transferring Unimanual Policy for General Bimanual Manipulation
Guanxing Lu*, Tengbo Yu*, Haoyuan Deng, Season Si Chen, Yansong Tang†, Ziwei Wang ICCV, 2025 project page / arXiv / Code A framework designed to transfer pre-trained unimanual manipulation policies to multi-task bimanual manipulation with few bimanual demonstrations. |
Experiences |

|
A*STAR Advanced Remanufacturing and Technology Centre (ARTC) Senior Scientist Intern May 2024 – Sep 2024 Singapore |
Academic Services
|
Honors and Awards
|
|
|